Design of the Master Device for Single Incision Surgery Robot
-
Unlike daVinci surgical system, in a single port surgery robot, all joints of the slave robot are located inside abdomen. We need to control not only the slave tip but all slave joints to increase the safety.
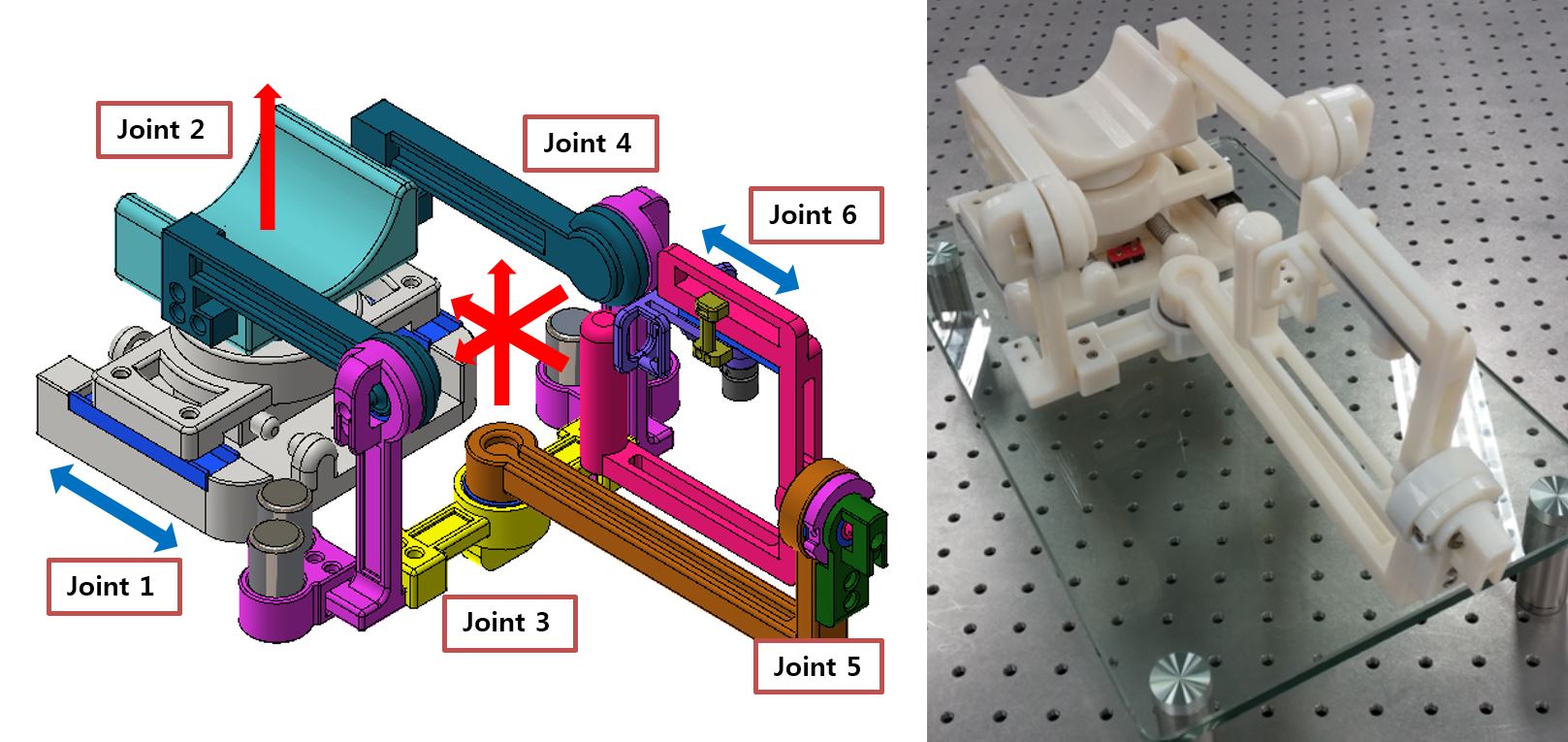
In this study, a master device was developed for PLAS which is one of the Y-type slave robot for single port laparoscopic surgery (SPLS). Because all joints of the Y-type robot are inserted in the human body during the surgery, we need to develop a master device which can control each joint of the robot separately. We focused on designing the master device in a perspective of the following factors. First, DOF and structure of a target slave robot must be analyzed. Then, according to ergonomics, joint matching among the master, slave, and human arm should be considered. Also, motion range of the human arm has to be analyzed. This ergonomic design helps operators control the slave robot comfortably. In addition, counterbalancing can minimize fatigue of operators.