Compliant Joint based Endoscopic Surgical Robot System for Bone Cyst Surgery
We develop compliant joint based endoscopic surgery robot system for bone cyst surgery. The cutting robot arm cuts the solid septum and debrides the fluid lesion in the bone cyst. The endoscopic robot arm display the bone cyst and irrigate the debris after cutting and debriding. The controller controls two robot arms.

Researchers
Seunguk Kim, Subin Lee, Hyeonwook Kim, Solzbacher Rene Marcel
Conferences
Wave-Shape Notched Compliant Joint with High Rigidity
Kim S, Shim S, Ji D, Hong J
Proceeding of Hamlyn Symposium on Medical Robotics 2019, 2019
Fundings
An albased diagnostic and minimally invasive surgical robotic system for precise treatment of hematologic bone diseases
Ministry of Trade, Industry and Energy
Robotic surgical procedure
● Concept of robotic surgery
Cutting robot arm
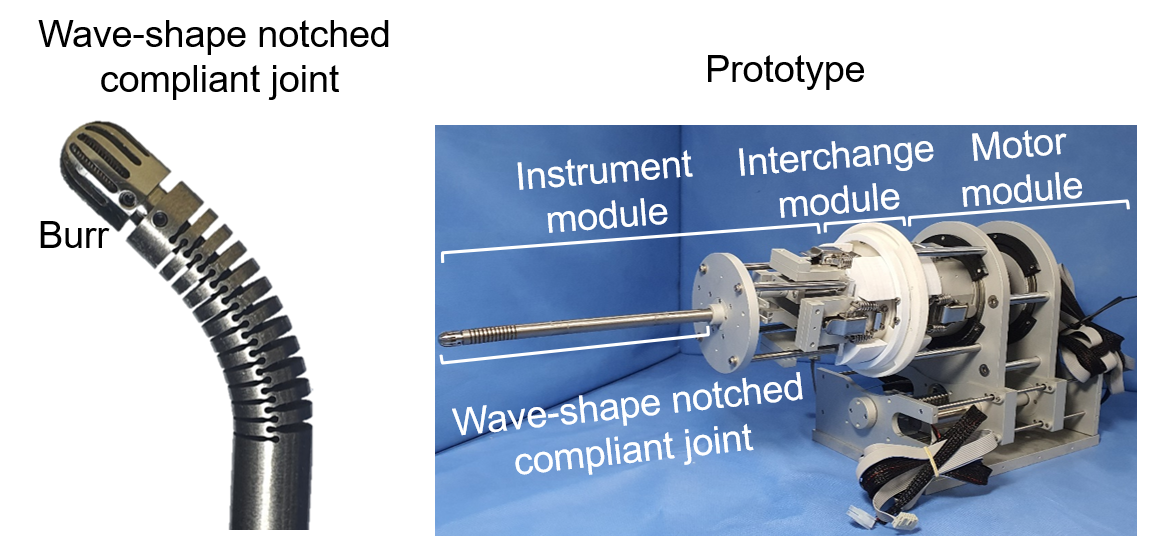
● Curved cutting with high rigidity: Wave-shape notched compliant joint
● 4 DOF motion: Bend & Rotate & Translate & Debride
● Sterilization: Separable driving module
Endoscopic robot arm

● Easy control: Motorize commercial endoscope
● 3 DOF motion: Bend & Rotate & Translate
● Sterilization: Separable driving module
Controller
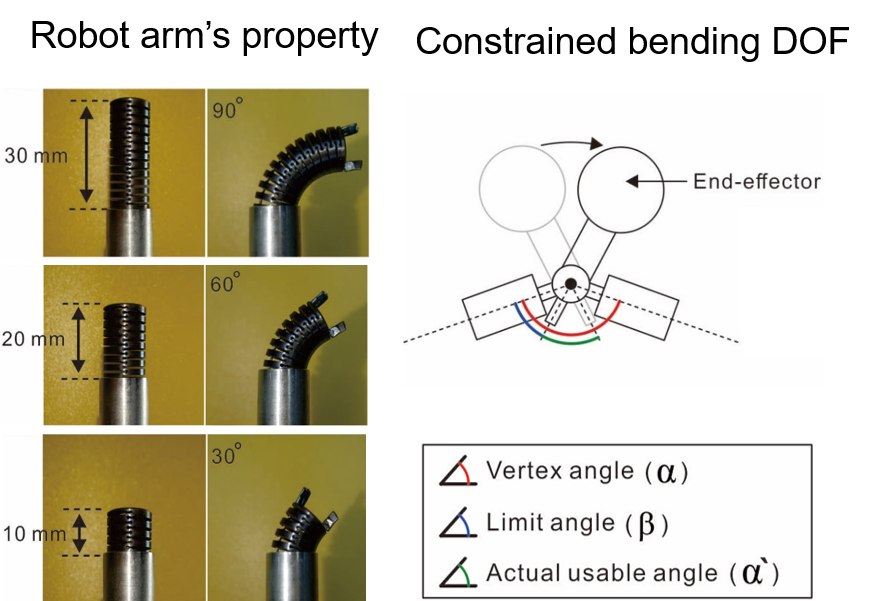
● Safely control: Constrained bending DOF to reflect robot arm’s property
● 3 DOF motion: Bend & Rotate & Translate
Animal experiment (Bone cyst phantom: Pudding)
● The feasibility of removing the bone cyst is verified
Animal experiment (Septum phantom: Femur of Cow bone)
●The feasibility of removing the solid septum is verified
Conclusion and future work
※ Conclusion
● We developed compliant joint based endoscopic surgical robot system for bone cyst surgery
● The cutting robot arm can perform curved-cutting for treating the solid septum and the fluid lesions with high rigidity by wave-shape notched compliant joint
● The endoscopic robot arm can display the bone cyst in the bone and irrigate and suck the debris after curved cutting by easily controlling the motorized endoscope
● The controller can safely control the two robot arms with reflecting the robot arm’s property by constrained bending DOF
● Through two animal experiments, the proposed system shows feasibility to operate the bone cyst surgery
※ Future work
● The haptic function will be developed to prevent curved cutting from damaging normal bone by recognizing between bone cyst and normal bone