An Integration System of Endoscope Holder and AR Navigation for Solving Line-of-sight Proble of Tracker in Sinus Surgery
To overcome the line-of-sight problem of optical tracking system in sinus surgery, an integration system of endoscope holder and AR navigation was developed. Using kinematics information of the holder, the line-of-sight problem was solved after solving key parameters to integrate both holder and navigation systems.

Researchers
Seongpung Lee
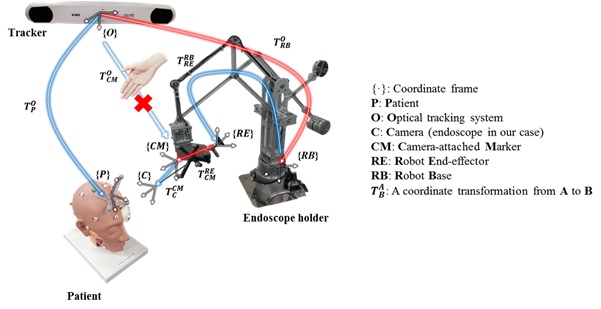
● Optical tracking system has been widely used for implementing AR navigation system in sinus surgery because of its accuracy and reliability as well as large tracking volume. General equation for implementing AR from the AR configuration as shown in Figure above is given by
![]()
● However, in case that CM is blocked by an obstacle or someone, no way to track CM from tracker exists (see Figure). To address it, we developed the integration system of endoscope holder and AR navigation for solving line-of-sight problem of optical tracking system in sinus surgery.
● An endoscope holder system for sinus surgery has been recently developed by Hanyang Univ. A motivation of developing this system was to help surgeons do two-hand surgery, and to release fatigue caused by holding the endoscope during sinus surgery.
● As a collaborative study, the holder was used as an alternate for solving line-of-sight problem. Both kinematics of the holder and two key unknown parameters (red arrows in Figure) are required for the integration of existing AR navigation with the holder. As a result, line-of-sight problem was solved by using the equation below.
![]()