Trigonometric Ratio-Based RCM Mechanism for Bone Drilling
This research proposes an improved RCM mechanism in which a pair of linear actuators and a gearless arc-guide are employed to achieve high rigidity and resolution, which enable bone drilling. A vision-guided navigation system is also integrated into the proposed system to automatically guide the orientation.

Researchers
SeongBo Shim
Conferences
Trigonometric Ratio-Based Remote Center of Motion Mechanism for Bone Drilling
Shim S, Lee S, Ji D, Choi H, Hong J
Proceeding of IROS 2018, 2018
Fundings
An albased diagnostic and minimally invasive surgical robotic system for precise treatment of hematologic bone diseases
Ministry of Trade, Industry and Energy
RCM mechanism
● Purpose
– To withstand the drilling force, the RCM mechanism should have high rigidity for tilting rotation.
– To conduct the drilling precisely, the RCM mechanism should have a high resolution.
– To position the RCM mechanism using a passive arm, the mechanism should have a compact structure.
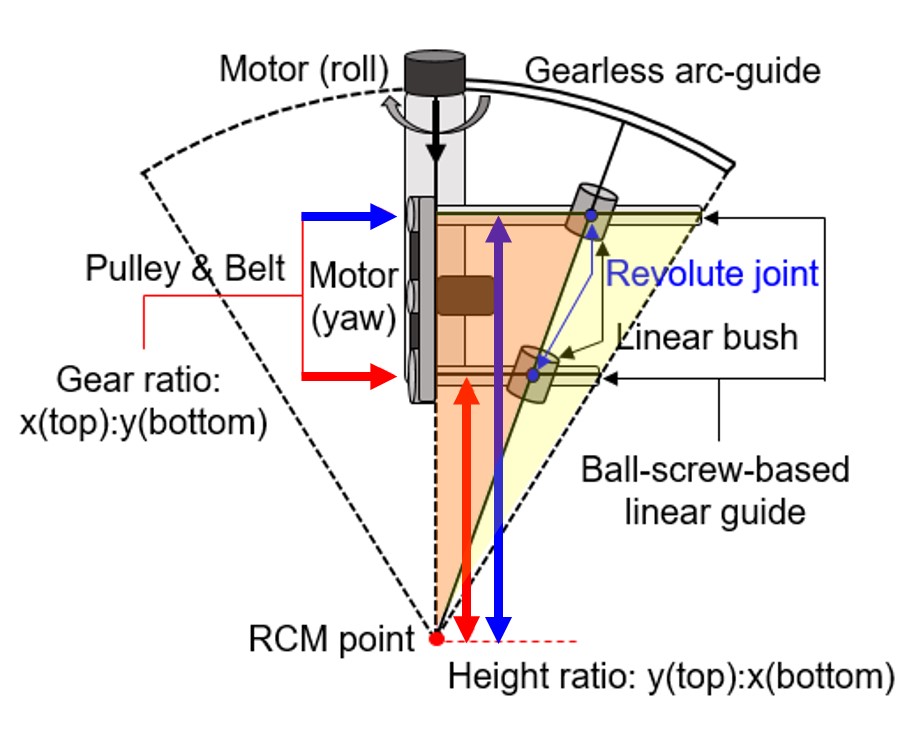
Kinematic model
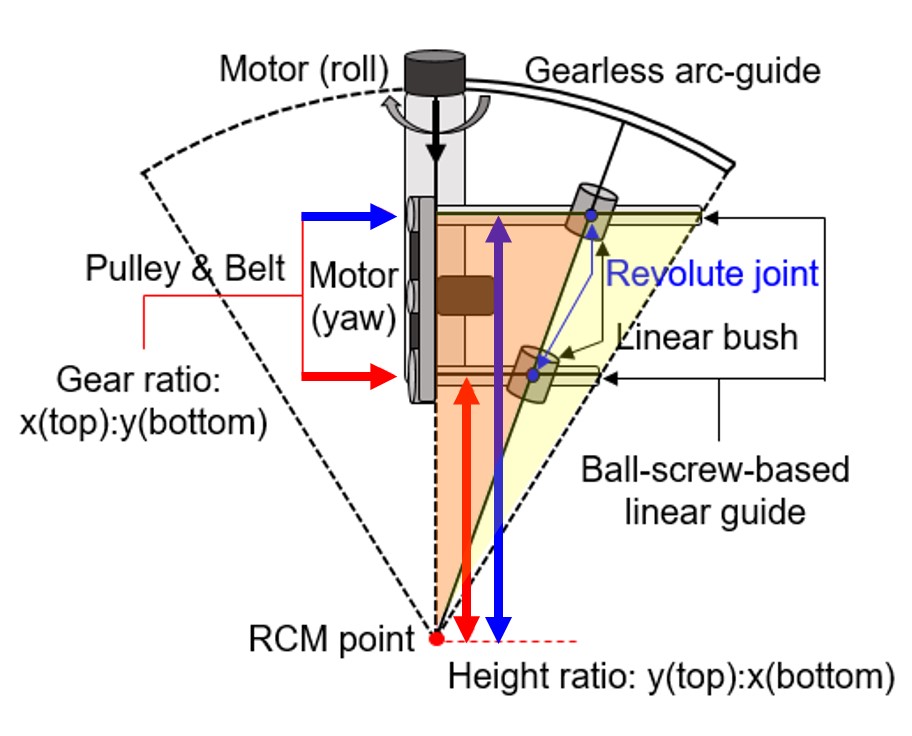
– Trigonometric-ratio for tilting motion
– Ratio of distance equal to the ratio of feed rate
Experiments
● RCM motion
– Accuracy of RCM points : 0.42 mm
Experiments and results
● Evaluation of RCM accuracy
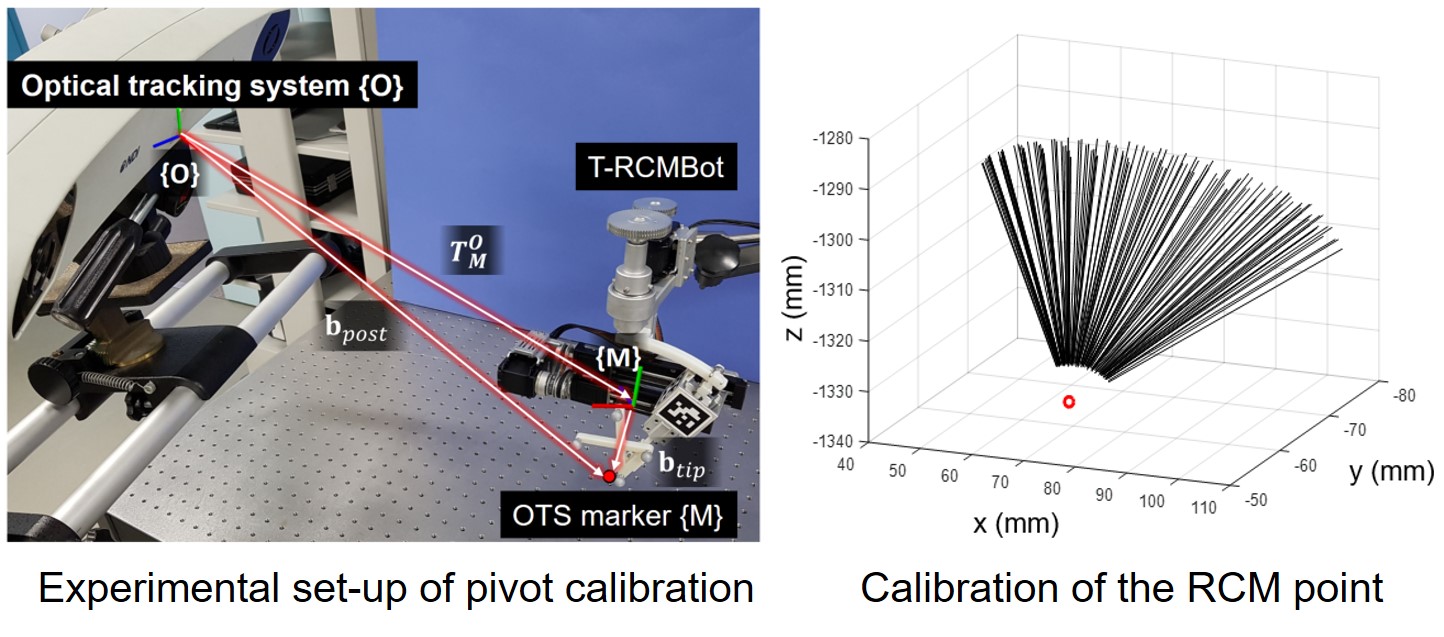
– The total RMS error of RCM points : 0.42 mm
– RMS error : [0.22 0.28 0.22] mm
Experiments
{kind=link}
– Maintain its tilting angle up to 50 N
Conclusion and future work
● Conclusion
– We developed a new mechanical type of RCM mechanism for bone drilling based on trigonometric ratio.
– T-RCM has sufficient accuracy and rigidity with compact structure.
● Future work
– The rolling friction based drilling mechanism will be integrated with the T-RCM for auto drilling.
– Force analysis and drilling test will be conducted using swine or cadaver bones.