Bone Surgery Robot with High-resolution and High-rigidity
We propose a new type of RCM mechanism to have a high resolution and rigidity. In addition, we designed a single motor-based drilling mechanism based on rolling friction. To achieve automatic control of the guiding and drilling process, we incorporated a computer-tomography-based navigation system.

Researchers
SeongBo Shim
Papers
Compact Bone Surgery Robot with a High-resolution and High-rigidity Remote Center of Motion Mechanism
Shim S, Ji D, Lee S, Choi H, Hong J
IEEE Transactions on Biomedical Engineering , doi: 10.1109/TBME.2019.2963705, Jan 2020
Fundings
An albased diagnostic and minimally invasive surgical robotic system for precise treatment of hematologic bone diseases
Ministry of Trade, Industry and Energy
Drilling mechanism
※ Single motor based drilling mechanism
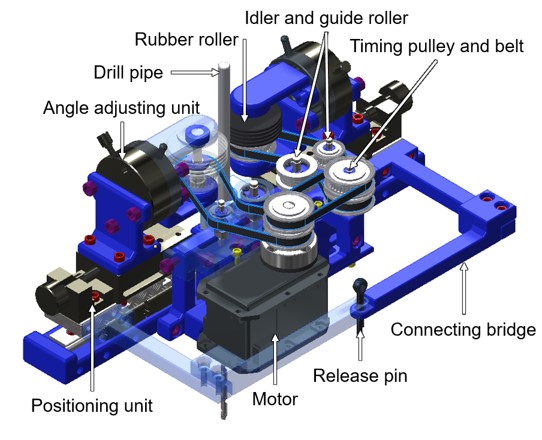
● Reduction of the number of the motors to be cost effective and free from motor synchronization.
RCM mechanism
※ Dual trigonometric ratio based RCM mechanism (DT-RCM)
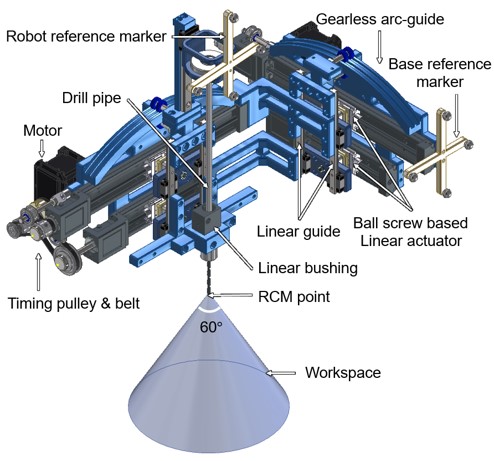
● Each trigonometric ration based tilting mechanism were orthogonally connected.
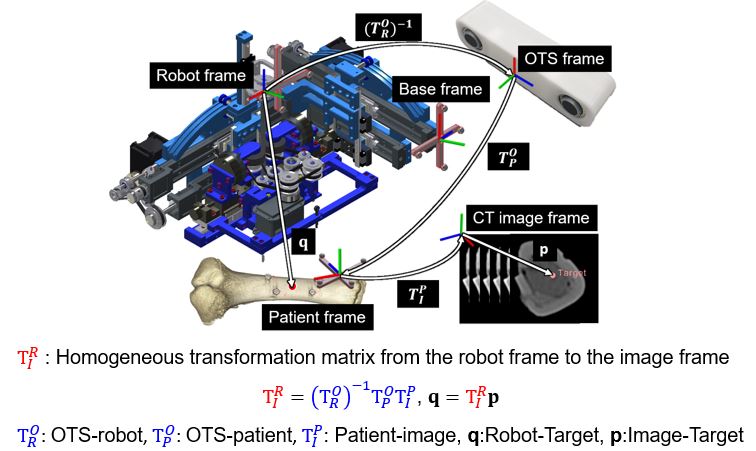
Image guided navigation system
※ System configuration
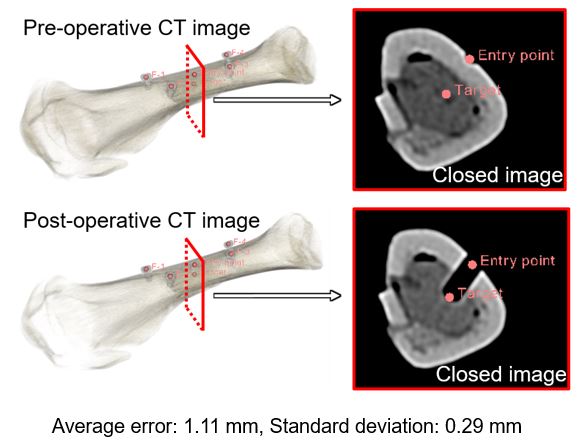
※ Performance
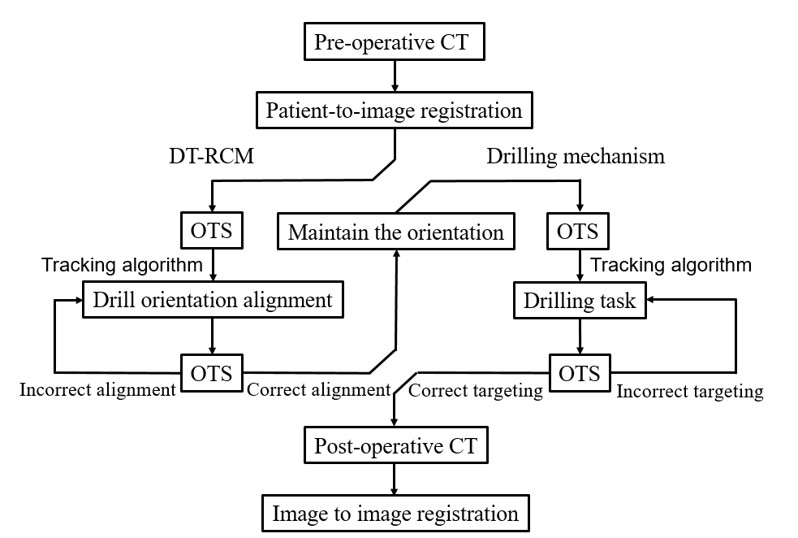
Image guided navigation system
※ Drilling test (workflow)
※ Drilling test
Conclusion
● We developed a compact bone drilling robotic system with CT image guidance.
– High resolution and rigidity RCM mechanism which is operated by only linear actuators.
– Rolling friction based drilling mechanism which is operated by a single motor with a release function
● The experimental results showed that the proposed robotic system has sufficient rigidity and accuracy for bone drilling.
– Required rigidity and accuracy: 17 N and 2 mm
– Achieved rigidity and accuracy: 50 N and 1.1 mm