A vision guided screw insertion robotic system for bone tissues using rolling frictions
Purpose
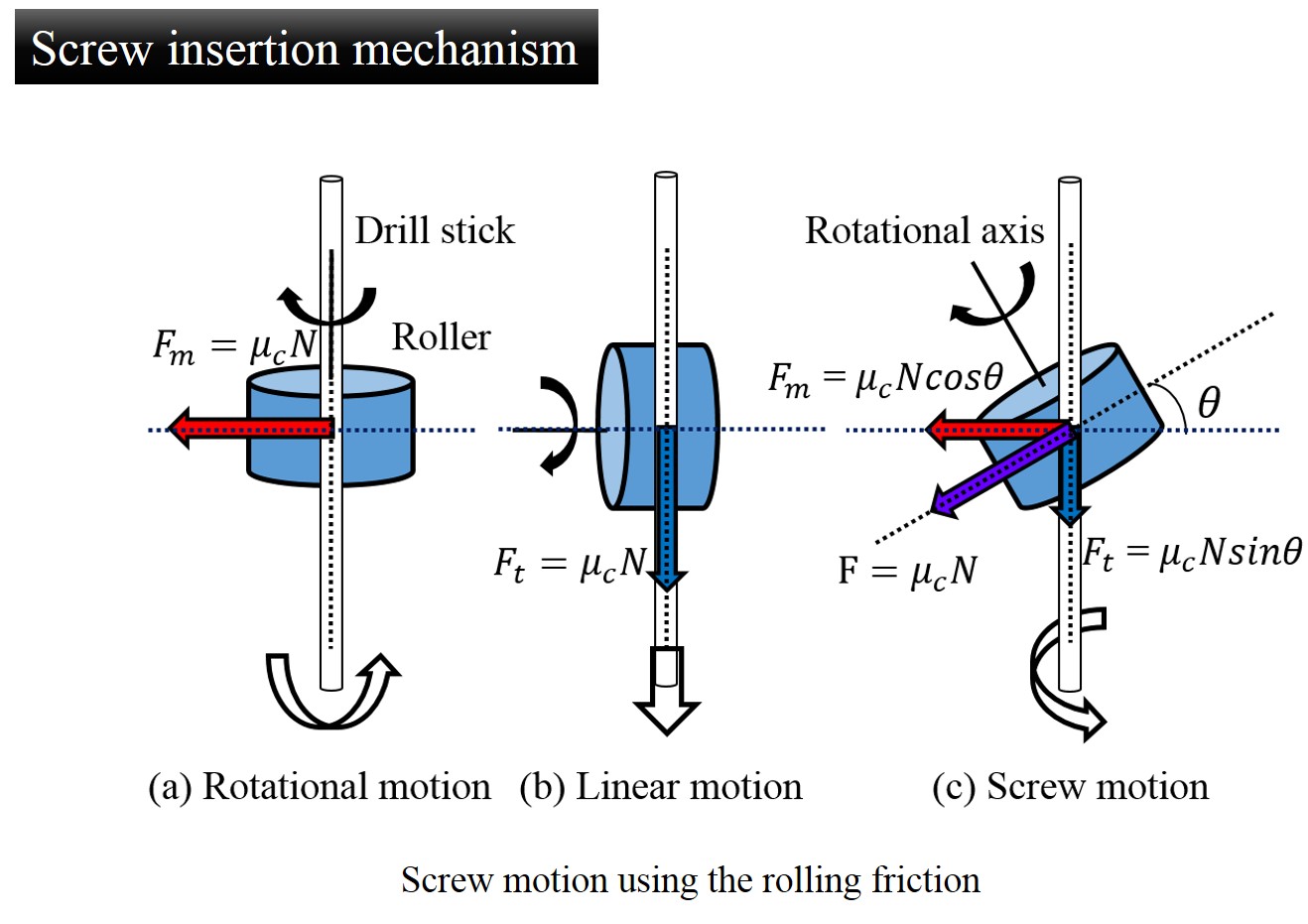
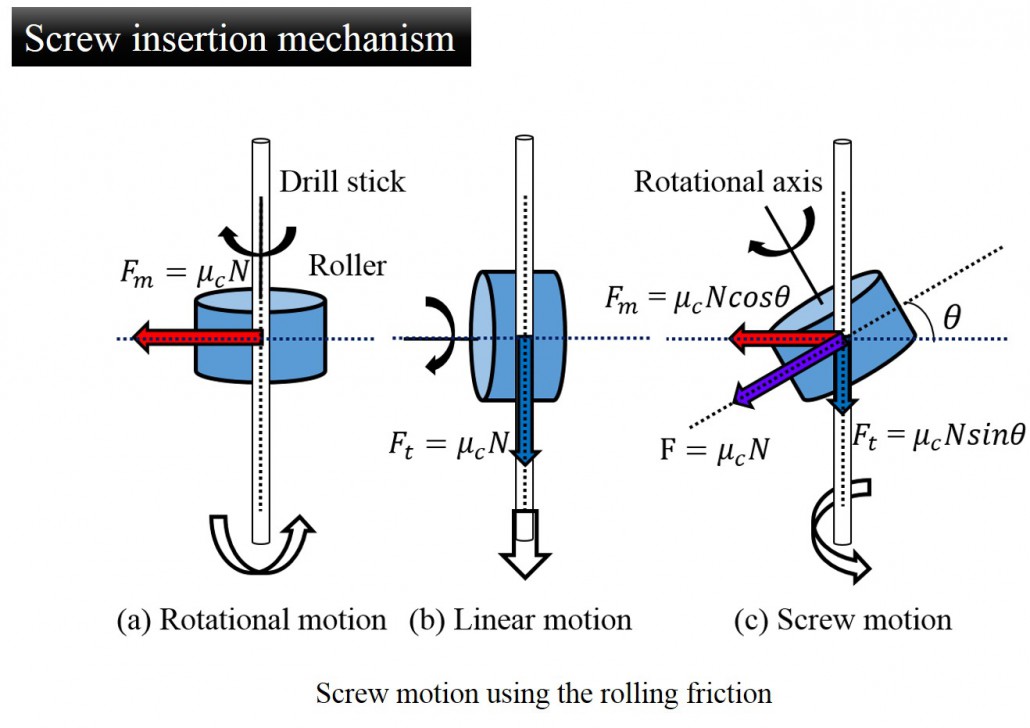
- We proposed a novel mechanism using rolling frictions for drilling bone tissues to ensure the surgical safety.
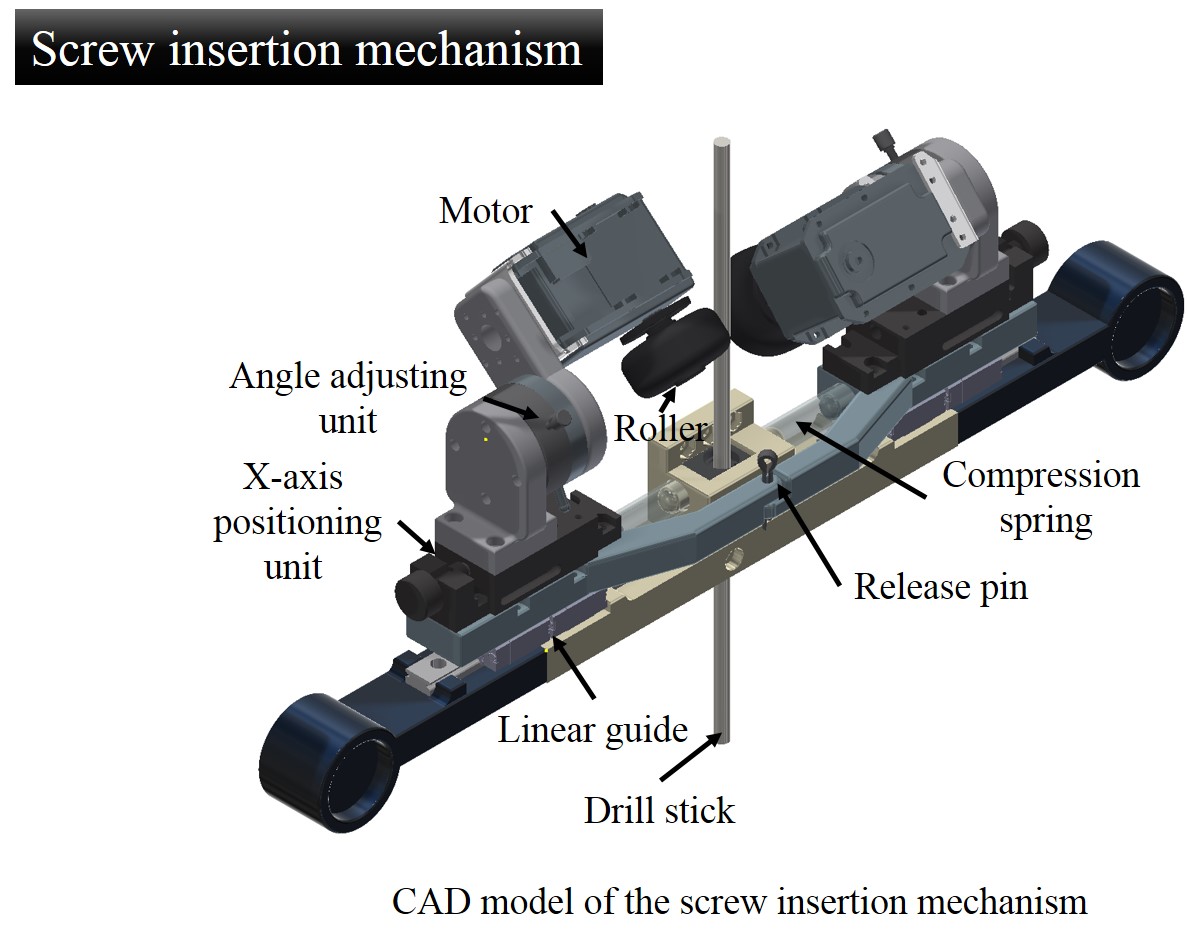
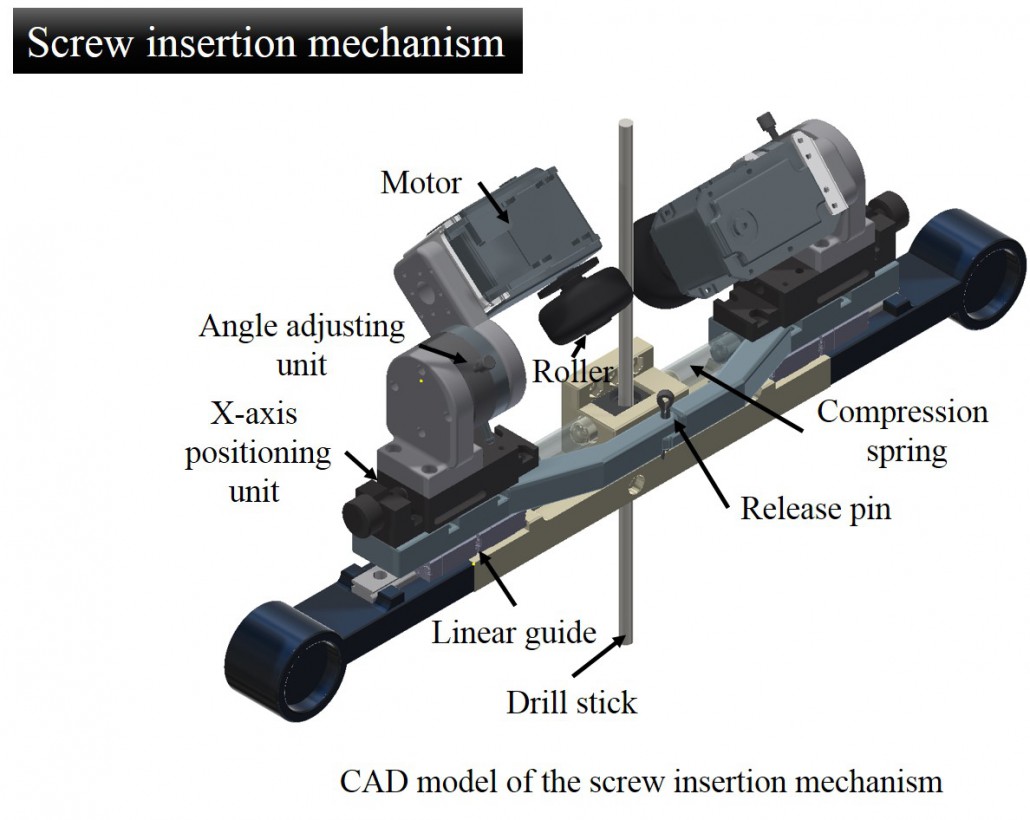
- Since the proposed force transmission method is the friction based method, there is no mechanical connection between the robot and drill.
- It makes the separation between the robot and the drill to be easily available at the emergency situation.
Conclusion
- We proposed an insertion mechanism by using rolling friction for surgical safety of the auto drilling.
- The mechanism can induce a desired moment and thrust force by adjusting the angle of the roller