Flexible robot with ball based spherical joint for single port laparoscopic surgery
This research aims to improve position accuracy of flexible robot for single port laparoscopic surgery.
Torsional deformation of flexible robot affects the accuracy of the flexible robot.
With this consideration, we are developing mechanisms preventing the torsional deformation structurally in order to improve the position accuracy of flexible robot.
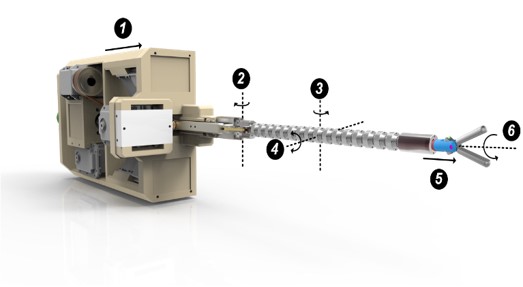
The proposed flexible robot consists of 6 degrees of freedom (DoF), which include 2 prismatic joint and 4 revolute joint, except for grasping motion of forceps.