Robotic System for Bone Drilling Using a Rolling Friction Mechanism
This system provides automatic drill tip alignment and target drilling. Unlike previously proposed robotic drilling systems, the system developed here employs a drilling mechanism based on rolling friction and an orientation mechanism using a four-bar linkage with a linear actuator.

Researchers
SeongBo Shim
Papers
Robotic System for Bone Drilling Using a Rolling Friction Mechanism
Shim S, Choi H, Ji D, Kang W, Hong J
IEEE/ASME Transactions on Mechatronics, 23(5):2295-2305, July 2018
Fundings
An albased diagnostic and minimally invasive surgical robotic system for precise treatment of hematologic bone diseases
Ministry of Trade, Industry and Energy
Drilling Mechanism
● Drilling motion using rolling friction

● Drilling mechanism

● Release mechanism
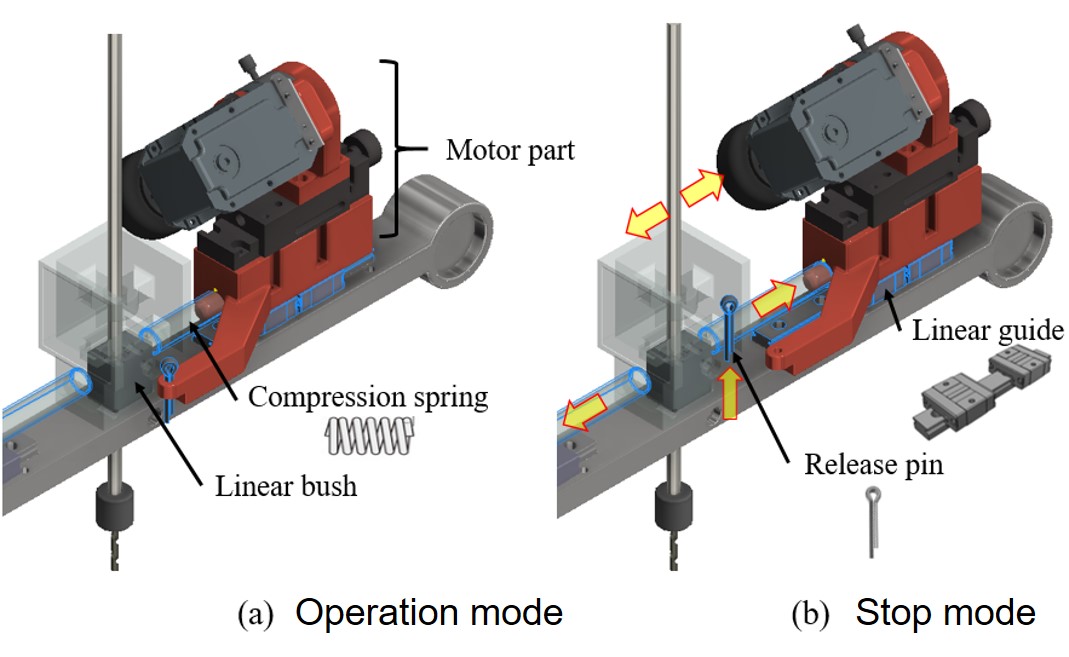
When the operator pulls the pin out, the compression springs push the motor parts back from the pipe.
Consequently, the power transmission from the rolling friction ceases, and the drill tip can be removed.
Experiments and results
● Ex-vivo drilling test on swine femur
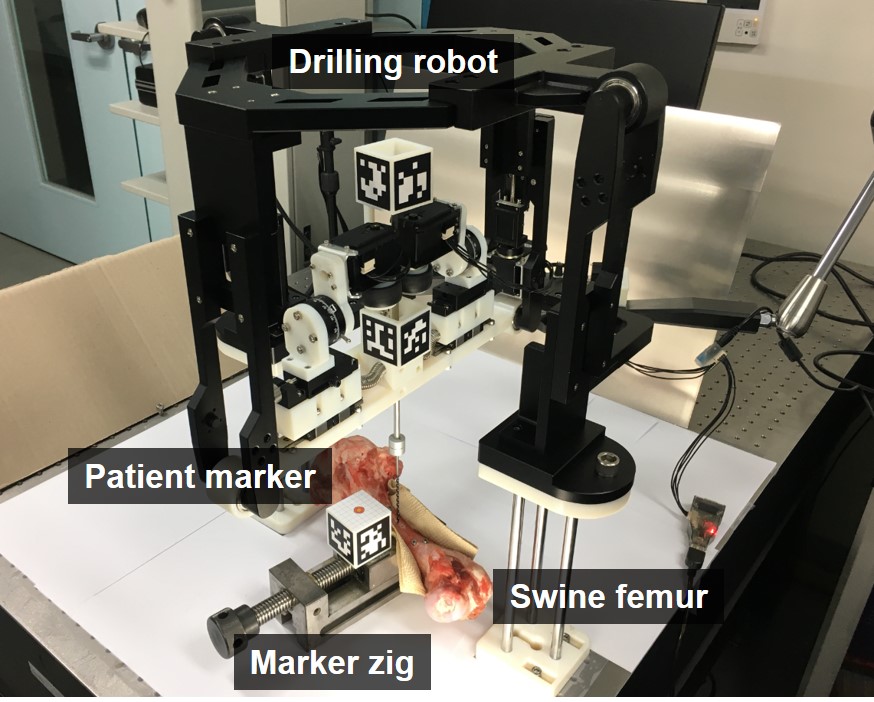
Experimental set-up for ex-vivo drilling test on swine femur
● Ex-vivo drilling test on swine femur
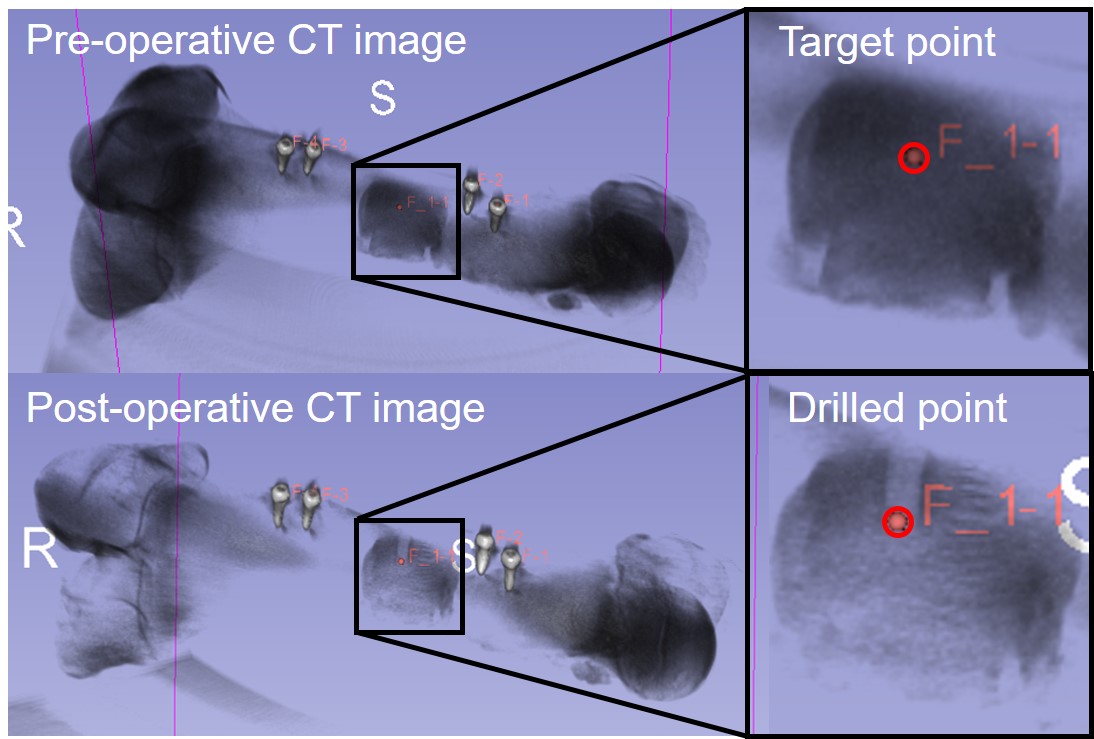
Mean targeting error : 2.30 mm
Conclusion and future work
● Conclusion
We developed a new type of drilling mechanism based on rolling friction.
– It has the advantages of facilitating drill tip detachment in emergency situations and enabling the robot to have a compact structure.
● Future work
The orientation mechanism should have a more compact structure to be fixed by a passive arm.
– The orientation mechanism should have a remote center of motion (RCM) mechanism to ensure that the entry point remains while the orientation mechanism is operated.